Manual remote operation of the robot can be highly accurate. However, it usually requires a high level of expertise from the operator and imposes a significant cognitive burden on the user. Therefore, the remote operation of the robot requires partial autonomy of the robot. As the degree of autonomy of the robot increases, the part of the user's remote operation becomes more and more important.
Recently, researchers at the University of Colorado published a paper called "Improving Collocated Robot Teleoperation with Augmented Reality" to explore the possibility of using AR's solution to remotely operate in the form of newer, more intuitive, visual feedback. Indicates that this will increase the efficiency of remote operations. This paper won the 2018 HRI Best Paper Award.

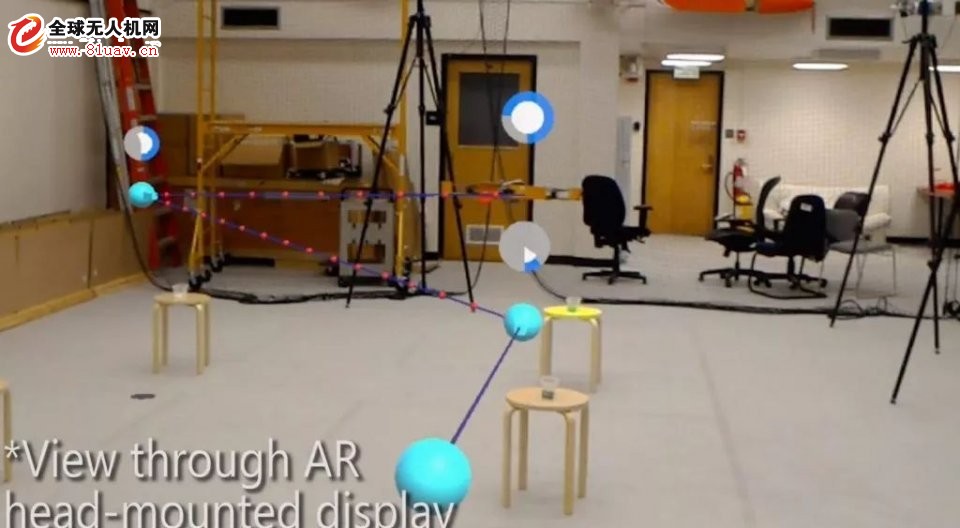
The system is obviously not complicated. It only needs to transfer the image of the remote robot camera to the user's AR head. However, the researchers made three divisions in the display mode. One is to directly send the image of the camera to the user, and the other is to directly send the image of the camera to the user. One is to use dots and lines in the image to provide orientation and position information for the robot, and the last is to map the image scene.
In order to verify the effects of these types of designs, the researchers conducted an experiment to give several groups of experimenters the operating equipment of different small drones . The experimenters were familiar with the operation for a while, and then the participants used their own operations. The equipment controls the drone to take off from a fixed position and observe the wall. This process requires the drone to be very close to the wall, so there is a possibility that the drone will be unstable, resulting in no If the man-machine falls, the observation fails. If it fails, the experimenter needs to observe the wall again from the beginning. After that, record the length of the observation and the experimenter's own operating experience and compare them.

The experimental results show that compared to the experimenter who uses the AR system for operation, the experimenter without the AR system often takes longer to realize the stability of the drone and the observation of the wall. These experimenters notice the instability, etc. In the case of the situation, it is often too late to correct, causing the drone to fall, or difficult to continue the experimental task, the experimenter's impression of the equipment is also difficult to control the drone. On the other hand, under the conditions of the AR system, even if the robot is operated exactly the same, it will feel easier to operate. Most of the experimenters said that "this operation is very easy, I feel very comfortable."
In addition to the improvement of the overall utility, the results of the paper experiments also found that among the experimenters using the AR system, only the operating device showing the robot's field of view content is better than other operating devices, but the user prefers to mark the robot's field of view. Or a device that divides points and lines, and considers the comfort of this device to be higher.
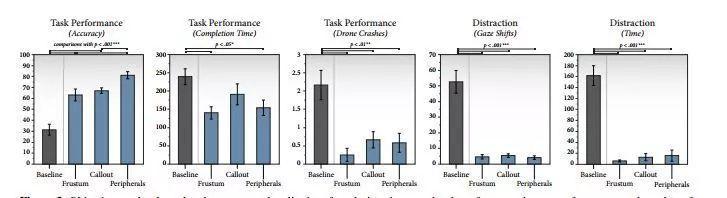
To sum up, in this paper, the researchers explored the design of a robotic remote augmented reality interface. Experiments on this design show that this design can significantly improve the performance and speed of remote operations while reducing control system crashes and robots. The probability of damage, the user's evaluation of usefulness and their own comfort is also higher. The paper believes that this new design is a new model that can reduce the distraction of the user's attention in the ordinary control mode. In short, it is a sentence, the application of AR to human-computer interaction will have a good effect.
Now, there are some AR glasses that can be used to operate drones in the market, but this is not the same as the goal pursued in this paper. On the one hand, the existing AR glasses are more focused on allowing users to directly enjoy drones. The beauty of the shot is taken instead of using the scene to improve the control of the drone. On the other hand, according to the paper, the operation of the drone is only a preliminary exploration of the system. This control method using AR will be used for operation in the future. More complex, more diverse types of robots, and used in engineering, surgery and other fields. Perhaps the future of this system is the same as in the movie Panthers?
Aluminum Cell Phone Stand, Durable Cellphone,Desk Cell Phone Stand Holder Aluminum Phone Dock Cradle,etc.
Shenzhen Chengrong Technology Co.ltd is a high-quality enterprise specializing in metal stamping and CNC production for 12 years. The company mainly aims at the R&D, production and sales of Notebook Laptop Stands and Mobile Phone Stands. From the mold design and processing to machining and product surface oxidation, spraying treatment etc ,integration can fully meet the various processing needs of customers. Have a complete and scientific quality management system, strength and product quality are recognized and trusted by the industry, to meet changing economic and social needs .

Aluminum Vell Phone Stand,Aluminum Cell Phone Desk Stand,Cell Phone Holder For Stand,Cell Phone Stands
Shenzhen ChengRong Technology Co.,Ltd. , https://www.dglaptopstandsupplier.com