An Augmented Reality Mark Recognition Algorithm Based on Cellular Automata
The mark recognition in the augmented reality system has always been the bottleneck of the augmented reality system, which occupies most of the system processing time. Even with the use of regular geometric marks, for the augmented reality system with high real-time requirements, the recognition algorithm is effective and The performance is also not ideal, so an application of cellular automata model, using given evolutionary rules, to improve the marker recognition algorithm in the augmented reality system is implemented in the ARTOOLKIT system. Experimental results show that the improved algorithm has greatly improved the real-time performance and recognition effect.
0 Preface
Augmented reality (AR) is a new technology that integrates real-world information and virtual world information seamlessly with the rapid development of virtual reality (VR) and actual application needs. Augmented reality systems are application systems that use augmented reality technology. Its important features are: the user has a sense of immersion, the virtual environment and the actual environment are integrated, and the disharmony caused by the true and false fusion is hardly felt; the system is interactive, and the user can directly interact with the virtual object or virtual environment through the interactive device Interaction: It is to add positioning virtual objects in three-dimensional space. Its research involves system structure, human-machine interface, three-dimensional registration, helmet display and so on. Using tags to achieve accurate registration of virtual objects is already a relatively mature technology, and has been widely used in indoor and outdoor to mobile applications and other environments. Mark recognition has always been the bottleneck of the augmented reality system, which takes up most of the processing time of the system. Even with regular geometric marks, the recognition algorithm results and real-time performance are not ideal for augmented reality systems with high real-time requirements. of.
Cellular automata (CA) is a dynamic system with discrete time and space. Each cell (Cel1) scattered in the regular grid takes a finite discrete state, follows the same rules of action, and is updated synchronously according to certain local rules. A large number of cells constitute the evolution of a dynamic system through simple interaction. Unlike general dynamic models, cellular automata are not determined by strictly defined physical equations or functions, but are composed of rules constructed by a series of models. Any model that satisfies these rules can be regarded as a cellular automaton model. Therefore, cellular automata is a general term for a class of models, or a method framework. It is characterized by discrete time, space, and state. Each variable takes only a limited number of states, and the rules for changing its state are local in time and space.
1 Traditional recognition algorithm
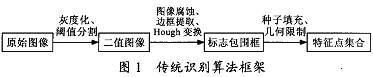
The recognition process of the visual mark includes the input image, the bounding box of the output image mark and the coordinates of the feature points. The design requirement of this process is to have better accuracy and meet real-time requirements, of which real-time performance is more important than accuracy. In the identification of marks, the generally available information is the edge information, geometry information, and chroma information of the mark. As shown in Figure 1. First convert the image into a binary image, and then use the techniques of erosion, frame extraction and Hough transform to obtain the sign surround, and then obtain the feature point set through means such as seed filling and geometric limitation.
2 Algorithm using CA model
The CA recognition algorithm is shown in Figure 2. It can be seen that the efficiency of the algorithm depends on the design of the CA module. The CA mold plough used in this article is as follows:

2.1 Cell space
Assume that the cell space is composed of two-dimensional M * N pixels. And assume that it is time synchronized. Define a two-dimensional image of size M ~ N
![]()
In the formula: M and N represent the height and width of the image respectively. Aid ') represents the state value of the point (that is, the gray value). For a k-value image, (in the state set ![]() Value. The video image with tags is shown in Figure 3.
Value. The video image with tags is shown in Figure 3.

Neighbor mode uses Moore. Each cell is composed as follows: each cell is composed of 4 components: GCell (c, p, e, v), where C represents grayscale, for simplicity, the threshold value is used to binarize first to obtain Or 1. Pay attention to eliminating isolated points in the process, otherwise it will affect the recognition effect. P indicates whether it is an edge point, if it is an edge point, it is 1, otherwise it is 0. e indicates whether it is an edge, or 1 if it is, otherwise 0. v indicates whether it is a vertex, 1 if it is, otherwise 0; i indicates whether it is the internal feature point of the mark, 1 if it is, otherwise 0. Using binary representation simplifies the operation. The system initial matrix is ​​as follows
According to equation (1), c = (0, 1, ...,) where the starting point is randomly selected. Experiments show that the effect of random selection is better than that of fixed selection, such as the case of boundaries. The algorithm uses fixed-value boundaries. Ensure that evolutionary operations do not exceed rectangular space.
2.2 Evolution rules
(1) First determine whether it is an edge point. According to the definition of the edge, if the state of a certain point is different from the state of most of its neighbors, that is, the gradient changes significantly, then this point can be considered as an edge point, otherwise it is considered as a background point, that is, a non-edge point. Based on this theory, the position of the edge point is determined according to the following rules.
![]()
(2) There are two methods for judging whether it is an edge point. As can be seen from Figure 1, the mark is composed of a square with a fixed width. If the width of the mark is d and the width of the black mark band is n, the following rules can be used to determine whether it is a point on the side of the square. That is, it must be an edge point and satisfy that n consecutive x or Y directions are all edge points. Or, satisfy that the d numbers in the continuous x or Y directions are all the same gray level. As shown in equations (4) and (5)


(3) Determine whether it is a vertex, if the vertex must satisfy the point on the edge and satisfy n consecutive x or Y directions are all equal gray. As shown in equation (6)

(4) The internal feature points must satisfy edge points and not edge points, as follows
![]()
(5) The end condition of the system is very important, otherwise according to the current research on CA, it is easy to fall into a chaotic state. Therefore, an end condition must be set. According to the application, the end condition is to find all vertices and the number of feature points meets the requirements of feature recognition. As follows:
![]()
3 Experimental results
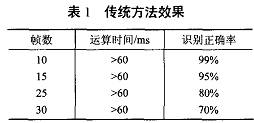
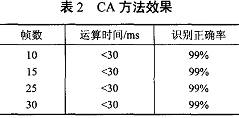
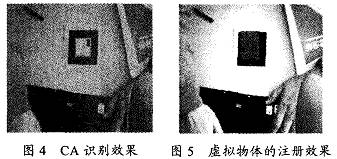
ARTOOLKIT is an efficient AR development platform. The mark recognition adopts the traditional method. The author used this platform to rewrite the algorithm of the mark recognition part, and achieved good results. In the case of the same background and the same PC and camera, the comparison experiment results are shown in Table 1, Table 2, and Figures 4 and 5. It can be seen that the system using the CA model has greatly improved the real-time performance under the condition that the recognition effect is very good.
4 Conclusion
The CA method uses binary operations and has limited evolution steps, so the efficiency of the algorithm is very high, which can better meet the real-time processing requirements of the AR system, and can reserve more time for the rendering program. Of course, because the application of CA in AR has just started, the CA algorithm should also be applied to many grounds of the AR system, such as coordinate system transformation, lighting processing, etc., which need to be further studied.
We've been around for over 16+ years. We make sure our sound is The Best Sound.
Our products include gaming headset, Bluetooth Earphone, Headphones Noise Cancelling, Best Wireless Earbuds, Bluetooth Mask, Headphones For Sleeping, Headphones in Headband, Bluetooth Beanie Hat, bluetooth for motorcycle helmet, etc
Manufacturing high-quality products for customers according to international standards, such as CE ROHS FCC REACH UL SGS BQB etc.
We help 200+ customers create custom Bluetooth headphones, earbuds, earphones, etc audio products design for various industries.
Customized Headphones, personalized gifts, promotional products custom , Bluetooth Earphones,Best Headphones
TOPNOTCH INTERNATIONAL GROUP LIMITED , https://www.itopnoobluetoothes.com