Automatic license plate recognition technology has important application value, is one of the key technologies of intelligent transportation systems ITS (Intelligent Traffic System) is. The image acquisition in the license plate recognition system is generally obtained by a CCD camera fixedly mounted above and above the channel. The image of the license plate photographed under ideal conditions is a rectangle, but in actual use, since the parking position of the vehicle has a certain randomness, The shooting distance and shooting angle are uncertain.
This article refers to the address: http://
Comparing a large number of on-site collected license plate photos, it is found that the uncertainty of the position of the vehicle causes the angle between the camera and the license plate to change, and the distortion of the license plate image is mainly tilted. The oblique image of the real license plate of the car is shown in Figure 1.
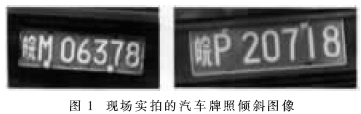
This tilting phenomenon will adversely affect the character segmentation. When the tilt is large, it is easy to cause mis-segmentation and the license plate recognition rate drops sharply. Therefore, in order to ensure the recognition rate of the system, it is necessary to perform the tilt correction of the license plate before the character division. Research on the correction of motor vehicle image distortion has achieved certain results, such as transforming the image space into Hough space by Hough transform, and searching for the extreme points corresponding to the license plate frame to determine the tilt angle of the license plate; And use bilinear coordinate transformation for image correction [1][2]; search for four vertices of license plate area in image space by template matching, and then reconstruct rectangular license plate area by spatial transformation [3]; obtain license plate by rotating projection The angle is corrected [4].
Because the frame of the license plate in the image is sometimes greatly affected by noise, smudges, etc., and because of the binarization and other reasons, the characters on the license plate may stick and break, so that the peaks in the parameter space after Hough transform are too scattered. The correction effect is not ideal. It is a strong anti-interference ability to obtain the tilt angle by rotating the license plate image on the coordinate axis. However, in this method, the optimal tilt angle is a search process, and multiple projections are required to search step by step. Good dip angle, high computational complexity.
From this point of view, whether it is Hough transform method, template matching method or rotary projection method, the image tilt angle or the related parameter solving process is based on the mechanism of spatial extreme point search, which will make the calculation amount large and the algorithm efficiency low. Whether to avoid space optimization, directly determining the image tilt angle by numerical calculation is an effective method to improve the tilt correction efficiency. In this paper, a new method of license plate image tilt correction based on Least Squares Support Vector Machine (5-[VM][5][6] is proposed. This method has not been reported in the field of image correction at home and abroad.
The method treats the binary distortion image as a data set with each "1" value pixel in the image as a sample in the data set. The characteristics of the sample are constructed as 3D, the first 2 dimensions are used as input vectors, and the coordinate values ​​of the pixels can be taken. The 3rd dimension is used as the output vector, and a constant can be taken (this article takes 0). Through the LS-SVM regression algorithm, the main regression parameter ω of the data set can be obtained. The theory proves that the parameter is the image tilt vector. Experiments show that the method converts the search process of image tilt angle to directly solve linear matrix equations, which simplifies the calculation, improves the efficiency of the algorithm, avoids the randomness and instability in the dip search process, and has no special frame for the license plate image. Claim.
1 Image tilt correction principle
If it is known that the image tilt angle is α, the coordinate system can be rotated to the tilt direction by linear transformation for the purpose of correction.

The ω in the equation is called a tilt vector.
The principle of rotation correction of the license plate image coordinate system is shown in Figure 2.
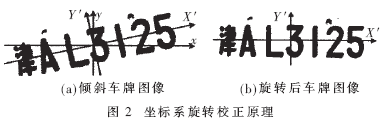
From this point of view, the key to the license plate tilt correction is to determine the tilt angle α or the tilt vector ω. Since the license plate image is rectangular when there is no tilt distortion, the projection variance of the "1" value pixel on the y' coordinate axis after rotation correction is the smallest, then:
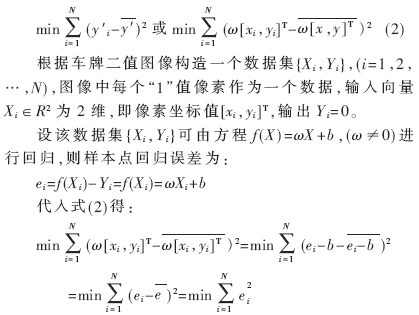
Therefore, it is only necessary to regress the data set {Xi, Yi}, and the parameter ω when the error ei variance is the smallest is the tilt vector. Thus, the optimization problem of the image tilt angle α is converted into a process of regressing the data set {Xi, Yi} and identifying the parameter ω.
2 LS-SVM solves the tilt vector algorithm
Let the sample of a certain data set be expressed as {Xi,Yi}, (i=1,2,...,N), Xi∈Rn is the n-dimensional input vector, and Yi∈R is the output, then construct the optimal linear regression function. for:
f(X)=ωX+b,ω≠0
In the algorithm, the structural risk is minimized to the learning rule [7], mathematically described as ωωT ≤ constant, and the second norm of the error ei is selected as the loss function. Thus, the optimization objective can be established as follows:

Since the data set constructed by the license plate image has the output Yi=0, and the regression parameter b is independent of the obtained tilt vector, the equation (4) can be simplified as:
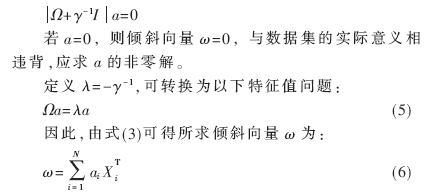
Where a uses the feature vector corresponding to the maximum |λ|.
It can be seen that the LS-SVM license plate image tilt correction is essentially the regression of the pixel coordinates by LS-SVM, and the tilt direction of the rectangular image is obtained, and then the original coordinates are rotated to the oblique direction by coordinate transformation, and each pixel is in y. The variance of the coordinate projection component is minimized.
3 LS-SVM license plate image correction steps
According to the principle of LS-SVM solving the tilt vector, the specific steps for correcting the tilted license plate image are as follows:
(1) Establishment of an image data set matrix. N is the number of all "1" value pixels in the binary tilted license plate image, then the image data set {Xi, Yi} (i = 1, 2, ..., N) can be constructed, where Xi is the input vector taking the pixel coordinate value [ Xi, Yi]T, the output Yi takes a constant (for the convenience of calculation, this paper takes 0). All input vectors Xi can be stored in the form of a matrix X2 x N.
(4) Solve the tilt vector ω and normalize it. Solving the characteristic problem of the equation (5), the eigenvector a corresponding to the maximum eigenvalue |λ| is obtained, and the image tilt vector ω is obtained by the equation (6). In order to avoid scaling of the image during rotation correction, the tilt vector ω must be normalized.
4 actual calibration experiment
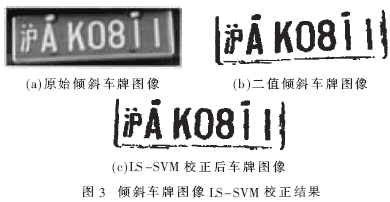
The tilting license plate image is extracted from the license plate image library for calibration experiment, and the corrected result of the tilted license plate image LS-SVM is shown in FIG. 3. Figure 3 (a) is a typical on-site license plate image. In the image, the upper frame is blocked due to improper installation of the license plate. Due to the incomplete image of the license plate border, the typical Hough method cannot correct it.
The experiment was carried out by the LS-SVM method, and the license plate image was first binarized, and the result is shown in Fig. 3(b). The image data set is constructed from the "1" value pixels in the binary image and zero-averaged, and then the symmetric matrix Ω is constructed and the feature vector a corresponding to the largest eigenvalue is obtained. Finally, the tilt vector of the license plate image is determined by the feature vector a:
x=(-0.0816,0.9967)
Therefore, the coordinate transformation formula of the oblique image obtained by the equation (7) is:
![]()
The pixel coordinates of the tilted license plate image are restored by coordinate transformation, and the purpose of correcting the tilt is achieved, as shown in Fig. 3(c).
Using the LS-SVM method proposed in this paper, the correction experiments of more than 200 tilted binary license plate images extracted from the license plate image library have received good results.
This paper expands the application field of LS-SVM and proposes a LS-SVM based license plate image tilt correction method. This method treats the binary distortion image as a data set and expands the characteristics of the sample to 3 dimensions according to the pixel coordinates. The data set is regressed by LS-SVM algorithm to obtain the regression parameter ω, that is, the image tilt vector; then the coordinate transformation matrix is ​​constructed according to the tilt vector to achieve the correction. This method converts the image Hough space optimization problem into linear matrix operation, which simplifies the calculation, improves the efficiency of the algorithm, and avoids the randomness and instability in the most advantageous search process. The theory and experiment show that the method can still achieve better results for images with unclear borders or large noise interference, and provides a new method and new idea for fast correction of image distortion by non-search method.
Dust Monitor,Dust Detector,Dust Detection,Dust Measuring
ZHEJIANG HUACAI OPTIC-TECHNOLOGY CO LTD , https://www.win3safety.com