1 Introduction The basic characteristics of stepper motors, such as pull-out characteristics, pull-in characteristics, holding torque characteristics and moment angle characteristics, are well known. However, the stepping motor also has a special but very important characteristic - the vibration characteristics are still relatively unfamiliar, lacking a complete understanding of its system. This aspect may be due to many factors affecting the vibration characteristics, which is difficult to master. Its regularity; on the one hand, the methods and means for quantitative research on vibration characteristics are not perfect. The vibration characteristic test system established by the author provides a means for experimentally studying the vibration characteristics of the stepping motor system, and then establishes the simulation model and method of the vibration characteristics of the stepping motor system, and solves the quantitative analysis and calculation of the vibration characteristics. The experimental and simulation methods systematically analyze and introduce the influence of different parameters on the vibration characteristics, which is conducive to further understanding and mastering the vibration characteristics, and is necessary for the workers who design, manufacture and apply the system. In order to make the research results have practical significance and representativeness, the research in this paper is combined with the actual system. The actual system consists of the most widely used two-phase hybrid stepping motor and modern current-type driver. 2 General description of vibration characteristics The vibration characteristics are expressed by the relationship between the amplitude of the rotor angular velocity fluctuation of the stepping motor and the control pulse frequency. It is an important characteristic to measure the smooth running of the motor. The characteristics of the vibration characteristics are that some peak points appear in different frequency domains. And the interval where the amplitude is increased, the former is the resonance point of the frequency of a certain harmonic torque and the natural frequency; the latter belongs to the unstable region of the zero damping or the negative damping state. Figure 1 shows the typical vibration characteristics of the measured. The stepping motor is a 86BH250B two-phase hybrid stepping motor. The basic technical data is: phase winding resistance R=1.2Ω, inductance l=10. 0mH, rotor rotation Inertia J = 2.4 × 10 -4 kg. Rotational potential coefficient Ke=0. 028 6V/(rad/s), damping coefficient p=l.4×10 -4 Nm/(rad/s), rated phase current 1=3A; holding torque Tk≥5Nm, The positioning torque To=0.15Nm, the number of rotor teeth Z=50, the number of energized states of the matched current control type driver can be m=1, 4, 8, 10 or 20, and the power amplifier stage voltage is 30V when experimenting.  2.1 Frequency domain division The stepper motor has its own natural frequency or natural frequency, which is estimated by the following formula:
2.1 Frequency domain division The stepper motor has its own natural frequency or natural frequency, which is estimated by the following formula:  The data of the tested motor is replaced by:
The data of the tested motor is replaced by:  It is customary to refer to the frequency domain near and below fcp=fo as the low frequency band; the definition of the high frequency band is not based on the absolute value of the frequency, and usually the frequency domain near and above fcp=mifo is called the high frequency band, and the above two frequency domains The middle band is called. Taking the characteristics of Fig. la as an example, fo≈160 pulses/s, m1=20, the general division can be considered as a low frequency band below 200 pulses/s, a high frequency band above 3 000 pulses/s, 200 to 3,000 pulses. The /s is called the mid-band. The characteristics of Figure la can be seen by frequency band division. There is a peak at the low frequency band fcp=160 pulses/s, which is the so-called low frequency resonance point; the middle frequency band has a resonance point at fcp=400 pulses/s and 800 pulses. And fy=5fo has a higher amplitude and is more prominent; the high frequency band has an oscillation region near fe=3 200 pulses/s, and there is a relatively unstable region at fp>3 600 pulses/s. 2.2 Basic electromagnetic cycle The stepper motor is operated under the control of different frequency input pulses and is energized according to a certain logic state. Therefore, there are two basic electromagnetic cycles, one of which is the reciprocal of the pull pulse frequency fcp, that is, the control. Pulse period:
It is customary to refer to the frequency domain near and below fcp=fo as the low frequency band; the definition of the high frequency band is not based on the absolute value of the frequency, and usually the frequency domain near and above fcp=mifo is called the high frequency band, and the above two frequency domains The middle band is called. Taking the characteristics of Fig. la as an example, fo≈160 pulses/s, m1=20, the general division can be considered as a low frequency band below 200 pulses/s, a high frequency band above 3 000 pulses/s, 200 to 3,000 pulses. The /s is called the mid-band. The characteristics of Figure la can be seen by frequency band division. There is a peak at the low frequency band fcp=160 pulses/s, which is the so-called low frequency resonance point; the middle frequency band has a resonance point at fcp=400 pulses/s and 800 pulses. And fy=5fo has a higher amplitude and is more prominent; the high frequency band has an oscillation region near fe=3 200 pulses/s, and there is a relatively unstable region at fp>3 600 pulses/s. 2.2 Basic electromagnetic cycle The stepper motor is operated under the control of different frequency input pulses and is energized according to a certain logic state. Therefore, there are two basic electromagnetic cycles, one of which is the reciprocal of the pull pulse frequency fcp, that is, the control. Pulse period:  The other is the fundamental period of the electromagnetic system with the power-on logic cycle as the cycle. If the number of logic energization states of the motor is m1, then:
The other is the fundamental period of the electromagnetic system with the power-on logic cycle as the cycle. If the number of logic energization states of the motor is m1, then:  The fundamental frequency of the motor winding voltage and current is:
The fundamental frequency of the motor winding voltage and current is:  Correspondingly, there are two kinds of resonance points on the vibration characteristics of the graph la, for example, the resonance point at fcp=160 pulses/s, and the fundamental frequency of the control pulse period is consistent with the natural frequency; The basic electromagnetic cycle is that its m1=20th harmonic frequency is consistent with the natural frequency. Similarly, the resonance point at fcp=800 pulses/s is the subharmonic oscillation of the gigabit for the control pulse period, but for the basic The electromagnetic cycle is the oscillation of the 4th harmonic. Both starting points can be used. Which one can more intuitively clarify from which angle the mechanism of oscillation is proposed. 3 Influence of the number of energized states The stepping motor controls one motor at the input pulse of different frequencies. Except for the difference of the number of energized states, other driving conditions are also measured under the same conditions. Figure lb shows the whole step operation, the largest step angle and the lowest resolution. It shows a more serious low-frequency resonance phenomenon. There is a prominent resonance point at fCP=fo (160 pulses/s), which is also obvious at fep. The resonance point. Figure 1a shows the 20-state operation, which improves the resolution, and the resonance phenomenon in the low frequency band is not obvious. There is still a resonance point, but the peak of the angular velocity vibration is not large, less than 40% of the whole step, the resonance point is not felt, and after the resolution is increased, the angular velocity corresponding to fo is proportionally reduced. The curve of Fig. 1b shows that there is a significant unstable region between 600 and 1500 pulses/s. The characteristics of Fig. 1a, after the number of energization states increases, the high frequency band is correspondingly changed to L≥3 000 pulses/s. It can be seen that the instability still exists, but the amplitude of the angular velocity fluctuation is slightly lower. There is a new resonance point in the middle frequency band fcp=400 pulses/s and 800 pulses/s, which is between the microsteps in the microstep driving. The resonance caused by the new disturbance caused by the uneven torque can be overcome by special research on the reference current waveform. In order to verify the simulation model and method of vibration characteristics, the characteristics of Figure 1 are simulated. The results are shown in Figure 2. Compared with the curve of Figure lb, the curves of the low frequency band are basically the same, and the frequency corresponding to the resonance point. It is basically consistent with the peak value. The frequency domain and the angular velocity oscillation amplitude of the high-frequency unstable region are also generally consistent. Compared with the curve of Fig. 1a, it can be seen that the low-frequency resonance point and the peak are consistent, and the frequency domain of the high-frequency unstable region Consistently, the amplitude of the angular velocity oscillation is somewhat high. The position of the intermediate frequency resonance point is consistent. The peak at fep=800 pulse/s is slightly lower, and the peak deviation at fcp=400 pulse/s is larger. The nonlinear influence of the moment synthesis is not precisely considered, and needs to be further improved. In general, the simulation results can basically reflect the main characteristics of the vibration characteristics, and use it to study the influence of different parameters on the vibration characteristics, mainly based on the vibration characteristics. Relative change.
Correspondingly, there are two kinds of resonance points on the vibration characteristics of the graph la, for example, the resonance point at fcp=160 pulses/s, and the fundamental frequency of the control pulse period is consistent with the natural frequency; The basic electromagnetic cycle is that its m1=20th harmonic frequency is consistent with the natural frequency. Similarly, the resonance point at fcp=800 pulses/s is the subharmonic oscillation of the gigabit for the control pulse period, but for the basic The electromagnetic cycle is the oscillation of the 4th harmonic. Both starting points can be used. Which one can more intuitively clarify from which angle the mechanism of oscillation is proposed. 3 Influence of the number of energized states The stepping motor controls one motor at the input pulse of different frequencies. Except for the difference of the number of energized states, other driving conditions are also measured under the same conditions. Figure lb shows the whole step operation, the largest step angle and the lowest resolution. It shows a more serious low-frequency resonance phenomenon. There is a prominent resonance point at fCP=fo (160 pulses/s), which is also obvious at fep. The resonance point. Figure 1a shows the 20-state operation, which improves the resolution, and the resonance phenomenon in the low frequency band is not obvious. There is still a resonance point, but the peak of the angular velocity vibration is not large, less than 40% of the whole step, the resonance point is not felt, and after the resolution is increased, the angular velocity corresponding to fo is proportionally reduced. The curve of Fig. 1b shows that there is a significant unstable region between 600 and 1500 pulses/s. The characteristics of Fig. 1a, after the number of energization states increases, the high frequency band is correspondingly changed to L≥3 000 pulses/s. It can be seen that the instability still exists, but the amplitude of the angular velocity fluctuation is slightly lower. There is a new resonance point in the middle frequency band fcp=400 pulses/s and 800 pulses/s, which is between the microsteps in the microstep driving. The resonance caused by the new disturbance caused by the uneven torque can be overcome by special research on the reference current waveform. In order to verify the simulation model and method of vibration characteristics, the characteristics of Figure 1 are simulated. The results are shown in Figure 2. Compared with the curve of Figure lb, the curves of the low frequency band are basically the same, and the frequency corresponding to the resonance point. It is basically consistent with the peak value. The frequency domain and the angular velocity oscillation amplitude of the high-frequency unstable region are also generally consistent. Compared with the curve of Fig. 1a, it can be seen that the low-frequency resonance point and the peak are consistent, and the frequency domain of the high-frequency unstable region Consistently, the amplitude of the angular velocity oscillation is somewhat high. The position of the intermediate frequency resonance point is consistent. The peak at fep=800 pulse/s is slightly lower, and the peak deviation at fcp=400 pulse/s is larger. The nonlinear influence of the moment synthesis is not precisely considered, and needs to be further improved. In general, the simulation results can basically reflect the main characteristics of the vibration characteristics, and use it to study the influence of different parameters on the vibration characteristics, mainly based on the vibration characteristics. Relative change. 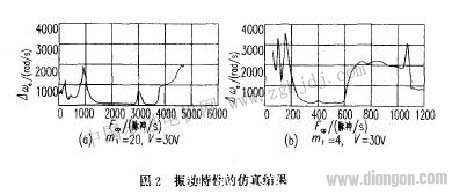 4 Influence of the power amplifier stage voltage Figure 3 shows a vibration characteristic when the power amplifier stage voltage value is different. Compared with Fig. 2a, it can be seen that the power amplifier stage voltage has a significant influence on the vibration characteristics. The most obvious effect when the power amplifier voltage increases is that the high frequency unstable region moves to a higher frequency domain; when the power amplifier voltage changes, the vibration characteristics of the low frequency band are basically unchanged; the position of the intermediate frequency resonance point does not change, and the peak value increases. Taking measures to suppress the intermediate frequency oscillation, using the method of increasing the power amplifier voltage to remove the high frequency unstable region is a convenient method to improve the running stability.
4 Influence of the power amplifier stage voltage Figure 3 shows a vibration characteristic when the power amplifier stage voltage value is different. Compared with Fig. 2a, it can be seen that the power amplifier stage voltage has a significant influence on the vibration characteristics. The most obvious effect when the power amplifier voltage increases is that the high frequency unstable region moves to a higher frequency domain; when the power amplifier voltage changes, the vibration characteristics of the low frequency band are basically unchanged; the position of the intermediate frequency resonance point does not change, and the peak value increases. Taking measures to suppress the intermediate frequency oscillation, using the method of increasing the power amplifier voltage to remove the high frequency unstable region is a convenient method to improve the running stability. 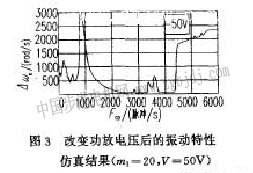 5 Conclusions (1) Using micro-step drive technology to improve the resolution has a significant effect on improving the smoothness of low-frequency operation. (2) Microstep drive has a certain influence on high frequency instability, but it cannot be eliminated, and other measures need to be taken to eliminate it. (3) When the microstep operation, it will cause a new resonance point in the middle frequency band, which needs special research and solution. (4) Increasing the power amplifier voltage can make the high-frequency unstable region move to a higher frequency domain, which is beneficial to improve the stability of operation in a certain frequency domain.
5 Conclusions (1) Using micro-step drive technology to improve the resolution has a significant effect on improving the smoothness of low-frequency operation. (2) Microstep drive has a certain influence on high frequency instability, but it cannot be eliminated, and other measures need to be taken to eliminate it. (3) When the microstep operation, it will cause a new resonance point in the middle frequency band, which needs special research and solution. (4) Increasing the power amplifier voltage can make the high-frequency unstable region move to a higher frequency domain, which is beneficial to improve the stability of operation in a certain frequency domain.
Remote Controller Socket Converters
Remote Power Socket,Remote Control Socket Adaptors,Remote Control Plug Adapters,Remote Control Socket,Remote Power Switch
NINGBO COWELL ELECTRONICS & TECHNOLOGY CO., LTD , https://www.cowellsockets.com