Principles of leak detection and location
When a pipeline leaks, due to the pressure difference between the inside and outside of the pipeline, the fluid quickly disappears and the pressure drops. The fluid on both sides of the leakage point is replenished to the leakage point due to the pressure difference. This process is sequentially transmitted upstream and downstream, which is equivalent to a negative pressure wave propagating at a certain speed at the leakage point.
The transient pressure wave positioning method is to calculate the position of the leak point according to the time difference of the transient pressure wave generated by the leakage to the upstream and downstream and the propagation speed of the pressure wave in the pipe. The propagation speed of pressure waves in crude oil is generally about 100 ()-1200m / s. As long as the pressure sensors at both ends of the pipeline accurately capture the negative pressure wave, the leak can be detected and can be carried out according to the propagation time and speed of the negative pressure wave Positioning: The positioning formula is as follows: 
In the formula: X is the distance between the leak point and the pressure measurement point at the head end; L is the length between the head and tail of the pipeline; a is the propagation speed of the pressure wave in the pipeline medium; Ot is the time difference between the upstream and downstream sensors receiving the pressure wave. Because this method has a fast response speed and a high positioning accuracy, this paper still uses it as a detection method.
The technical transformation of the original system is based on the understanding of the above defects, we have carried out the technical transformation of the original system software and hardware.
3.1 The hardware composition is shown in Figure 2. We used a pressure sensor with an accuracy of 0.1% and a range of 1.5Mpa and a turbine flowmeter with an accuracy of 5%. The Advantech PCL-818L acquisition board was used for A / D conversion and 12-bit quantization. 5V input voltage, sampling frequency lOkI-Iz. The local computer is connected to the loom Ethernet through a hub. The entire system uses the US mode. The local computer acts as a server to provide field I / 0 data to the remote computer through the Ethernet.
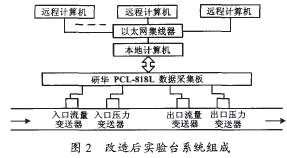
Figure 2 The composition of the experimental bench system after transformation
Car Cable Harness, also known as a wire harness, cable assembly, wiring assembly or wiring loom, is an assembly of electrical cables or wires which transmit signals or electrical power. The cables are bound together by connector, terminal, cable ties, sleeves, electrical tape, conduit, PVC tube, corrugate tube, string, or a combination thereof.
Commonly used in automobiles, as well as construction machinery, cable harnesses provide several advantages over loose wires and cables. For example, many aircraft, automobiles and spacecraft contain many masses of wires which would stretch over several kilometres if fully extended. By binding the many wires and cables into a cable harness, the wires and cables can be better secured against the adverse effects of vibrations, abrasions, and moisture.
Car Wire Harness,Wiring Harness,Car Electrical Wiring Harness,American Autowire Mustang Harness
Dongguan YAC Electric Co,. LTD. , https://www.yacenter-cn.com