I participated in the Consumer Electronics Show (CES) in Las Vegas this year and managed to take the Inducts driverless car Navia on a closed road at 12.5 mph. The whole process gives me a very safe feeling. But I still can't be sure that I will give the software, laser radar and camera as the driver's unique control.
This article refers to the address: http://
Commercial aircraft have been using autopilot, auto-access and landing software for a long time during flight, but they don't have to deal with pedestrians that suddenly appear on the road, or they are busy with text messages in the rear car without observing slower front speeds. Then quickly hit the person behind your bumper.

Inducts' driverless car Navia
The good news is that the industry is doing a lot of development work on software and electronic control functions that are expected to further improve the safety and ultimately implementation of autonomous vehicles. Let us understand the progress of some of these technologies.
University of Waterloo
Steven Waslander and Nuvation formed a very good team in autonomous vehicles, and their published papers and developed test tracking platforms proved that the theoretical solution was satisfactory. Mike Worry, CEO of Nuvation, is a graduate student in electrical engineering at the University of Waterloo. He signed a four-year research agreement with the University of Waterloo with the goal of developing new products for autonomous vehicles.
The importance of the dynamic performance of self-driving car tires
The dynamic performance of autonomous vehicles is critical to the safety of passengers, pedestrians and other vehicles on the road. These dynamic properties are used by controllers in autonomous vehicles and require a good understanding and rigorous testing to prove the safety of autonomous vehicles. Some recent controller designs are attempting to operate the car close to the tire friction limit in order to maximize car performance.
Tire/road friction and their interaction play an important role in the dynamic performance of autonomous vehicles. The Slip Circle (Figure 1) shows the maximum force produced by the tire.
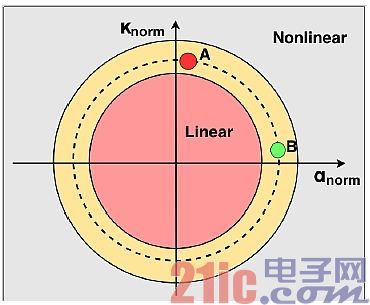
Figure 1: The horizontal axis in the sliding circle is used as the normalized side slip angle, and the vertical axis is the normalized longitudinal sliding ratio. Point A is a point of high sliding ratio and low sliding angle, which represents the situation when the car accelerates. Point B is a point of low sliding ratio and high sliding angle, which represents the situation when the car is striking the direction. The dotted line indicates that the car is driving at the friction limit. (Excerpt from Reference 1)
The team tried to estimate the parameters of the sliding circle because the sliding angle and longitudinal sliding can predict the dynamic performance of the car. They found that the sliding angle can be calculated from the measurements of the precise GPS and inertial measurement unit (defined by Xsens, which was recently acquired by Fairchild). The problem is that this method is very sensitive to noise and low-cost sensors on existing commercial vehicles are not well supported. These questions remind the researchers to consider the estimation/observer algorithm, as shown in Figure 2.
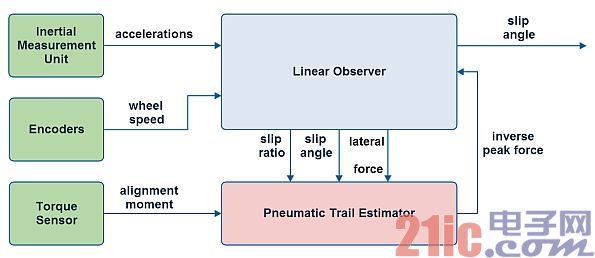
Figure 2: Observer block diagram with tire drag estimator (Nuvation feed).
The Extended Kalman Filter (EKF) was developed to estimate the sliding angle and longitudinal slip of the tire on the road surface. It turns out that EKF can only work accurately in linear tire zones and does not work accurately in non-linear zones.
The particle filter (PF) can make a relatively accurate estimation of the sliding angle at the cost of high computational intensity and inability to perform real-time estimation.
The trial unscented Kalman filter (UKF) shows that although they can give good results, this method is also based on sensors that are not commonly found in commercial vehicles.
Recent research suggests that the use of tire drag may be a better choice for estimating tire/road friction coefficient and lateral tire force. However, this method also has advantages and disadvantages. This method seems to be a good estimate of the friction coefficient and lateral tire force, and the linear observer can accurately track the side slip angles of the linear and nonlinear regions. Moreover, this method relies less on the accuracy of the model and tire parameters, and the calculation is simple, and the sensors currently installed on most commercial vehicles can be used. The disadvantage of this method is that it has some preconditions, including rear-wheel drive cars, negligible longitudinal wheel dynamics (acceleration and braking) (this will limit the exact tracking of the sliding angle near the horizontal axis of the sliding circle).
The article in Reference 1 uses a tire tow-based observer design in which longitudinal tire dynamics are added so that accurate sliding angle estimates can be obtained across the sliding circle domain. The Dugoff tire model is used to calculate tire/road force because it is more accurate than most other models, uses fewer parameters, and is less dependent on precise tire parameters.
The conclusion of this article and the method used is that this design is fast and does not require expensive sensors. This approach has proven to outperform other common observer designs in performance. At present, this model uses only the monorail bicycle model, but can be modified later to a more accurate four-wheeled vehicle model to estimate other vehicle dynamic performance.
This is a good starting point for accepting self-driving cars, but there is still a long way to go before you can safely hand the steering wheel, throttle and brakes to any fully automated driving system.
Adaptive cruise control and rear-end collision avoidance
These are functions that can and are being applied to the future of fully automated driving on the road. In addition to the blind spot mirrors and security cameras around the car, any accessibility features available will help distracting and careless drivers reduce accidents.
Many cars are already using Adaptive Cruise Control (ACC) to improve safety and comfort. Now we are looking forward to using car-to-highway communication technology to help improve traffic efficiency, just like California, and eventually develop into car-to-car communication. To achieve this, we need to implement cooperative adaptive cruise control (CACC). This will introduce wireless communication technology between cars to achieve closer car safety distances and less "ghost traffic congestion." This phenomenon is caused by "human" drivers who are too close to each other at the peak of traffic, even if a car is lightly stepping on the brakes, and the driver of the rear car will react in succession to amplify the incident. This phenomenon is also known as traffic instability. CACC can be used to completely eliminate this phenomenon.
The GCDC (Grand Cooperative Driving Challenge) organization claims that the members of the GCDC team are highly competitive with each other and aim to design and implement the most efficient cooperative automotive systems. This system is capable of performing advanced operations in a variety of collaborative scenarios. In order to achieve this, cars must exchange information about their orientation and intent through wireless communication, as shown in Figure 3.

Figure 3: The GCDC Challenge organization supports the development of innovative technologies for collaborative driving on real highways. (Photo courtesy of GCDC)
Here is the GCDC's comment on the autonomous driving car as the ultimate driving mode:
Road traffic will continue to face serious challenges due to congestion, traffic safety and emissions. Cooperative and autonomous driving systems can, to some extent, free drivers from driving work and may provide solutions to some of these problems.
There are different levels of autopilot systems on the market, and cars that are fully autonomous in all traffic conditions are still far away, but advanced driver assistance systems (ADAS) have entered the market. The adaptive cruise control and lane keeping assist system is proof.
The key to collaborative driving is communication. Information exchange enables cooperation between cars, cars and roadside systems. For example, understanding early warnings about upcoming traffic conditions, such as accidents and dangers, can result in more efficient and safe traffic flow.
In the 2011 GCDC, the car's CACC uses a linear feedback controller with feedforward components, as shown in Figure 4.
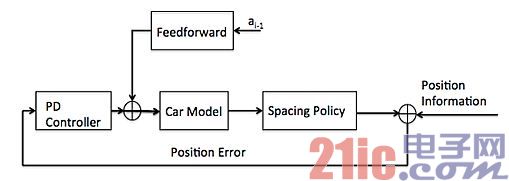
Figure 4: Feedback control model using a linear feedback controller with feedforward components (from Reference 3)
Proportional derivative (PD) controller
The gain of the PD (Proportional Derivative) is selected experimentally, and the feedforward controller is designed to improve the stability of the traffic on the highway. A simplified car model is used here, the parameters of which have little effect on the feedback controller. The key goal here is to use a controller that is fully adaptive to changes in the car model so that it can be used under actual road driving conditions.
The existing proportional differential control method cannot contain the limitations caused by the lateral controller and the sliding circle described earlier herein. If we want to get a viable working system that fits the real highway and the ordinary road, these problems need to be solved.
The dynamic model here uses the Model Predictive Control (MPC) technique derived from Reference 4. Suppose the car has 2 laser radars, one at the front of the car and one at the back of the car. The proposed control model is shown in Figure 5.
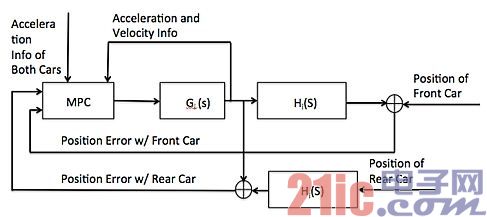
Figure 5: The proposed control model (taken from Reference 3).
This model makes it impossible for the error to accumulate when the rear vehicle is far away. Each car is equipped with a wireless data receiver for receiving acceleration information for both the front and rear vehicles, see Figure 6.
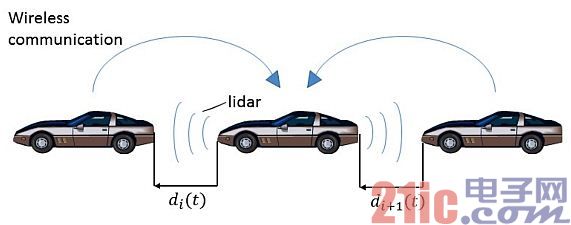
Figure 6: Each vehicle is equipped with a wireless data receiver that can simultaneously receive acceleration information for the front and rear vehicles.
Reference 3 writes:
The switch is based on
. in case
Less than 10 meters, then followed by a 6-state follow-up MPC model and using rear-end collision detection. Otherwise, the state MPC developed by Kianfar et al is used and only front vehicle collision detection is used. This ensures that our controller works in most cases with most other MPC controllers and will do better at critical times.
among them
with
It is the distance error between vehicles. This error should ideally be zero. Both of these errors are set with minimum constraints and the MPC is used to check for speed and speed errors between vehicles. In order to ensure that the system presents a steady state of traffic, when the acceleration is positive, we need to make the acceleration of the car always less than the acceleration of the preceding vehicle. If the acceleration is negative, the acceleration of the car becomes a lower limit (the upper and lower limits of the speed error are present in the front car, but the lower car has only lower limits).
The team mentioned in Reference 3 has built a platform with the help of Nuvation that can be used to test all CACC algorithms on a 1/5 size remotely controlled electric vehicle model running on the test track.

Figure 7: 1/5 size remote electric vehicle model on the test track. These cars can reach speeds of 120km/h (provided by Nuvation).
Summary of this article
There are already cruise control functions on the car today that control the accelerator pedal. Some cars have lane departure avoidance and security cameras. We will take the first step towards the future of self-driving cars using CACC, which will result in the addition of rear-end collision avoidance and smoother, safer traffic.
In an article in the Wall Street Journal, Nissan Motor Co. revealed that it will release a variety of autonomous driving functions by 2020. Carlos Ghosn, CEO of Nissan, said that there are currently four socio-economic trends associated with Autonomous Drive cars – the emergence of global megacities, growing demand for networking, ageing populations, and women’s influence and purchasing power in the market. growth of.
The next step for Nissan is:
Traffic congestion navigation. By the end of 2016, Nissan will provide cars that can be driven automatically and safely on congested highways.
Fully automated parking system. Also by the end of 2016, Nissan will install a fully automated parking system on a wider range of cars.
Multi-lane control. By 2018, Nissan plans to provide a car that can automatically determine the danger and change lanes.
Autopilot at the intersection. By 2020, Nissan will introduce an automatic driving function at the intersection, which will safely pass through the city crossing without the need for drivers to intervene in the car.
Ghosn distinguishes between Nissan's Autonomous Drive technology and self-driving cars.
“I want to clarify that there is a big difference between Nissan’s Autonomous Drive technology and self-driving cars. Autopilot is about releasing or reducing the driver’s daily tasks, especially Under congested or long-distance driving conditions, the driver can still control the car, but the car can do more things automatically, but Ghosn said, "the unmanned distance that does not require any manual intervention is actually commercial. There is a long distance. Currently they are only suitable for a strictly controlled road environment, requiring low speed and facing regulatory minefields."
Alligator Clip Cable,Alligator Clips With Wire,Crocodile Clip Wires,Battery Clips With Wire
Cixi Zhongyi Electronics Factory , https://www.zybreadboard.com